作者簡(jiǎn)介:孫劍鋒��,男��,河北石家莊人����,中國(guó)人民大學(xué)法學(xué)院暨刑事法律科學(xué)研究中心博士研究生�,研究方向:刑法學(xué)����。
摘要:人機(jī)共駕是指以自動(dòng)駕駛系統(tǒng)操作機(jī)動(dòng)車(chē)為主����、駕駛者隨時(shí)接管車(chē)輛為輔的一種新型駕駛模式。在面對(duì)緊急情況�,即保護(hù)駕駛者安全與公共安全相抵牾時(shí),駕駛者與自動(dòng)駕駛系統(tǒng)如何抉擇�����,便產(chǎn)生了“電車(chē)難題”��。自動(dòng)駕駛系統(tǒng)中的最小風(fēng)險(xiǎn)管理義務(wù)是駕駛者無(wú)法及時(shí)處理緊急情況時(shí)��,臨時(shí)接管機(jī)動(dòng)車(chē)的算法��,基于人工智能的治理原則����,以保護(hù)公共安全為優(yōu)位;而駕駛者面對(duì)緊急情況時(shí)基于本能反應(yīng)����,選擇保護(hù)自身安全��,犧牲公共安全��。對(duì)于二者的沖突�����,借助數(shù)據(jù)分析探索調(diào)和路徑�,通過(guò)對(duì)影響交通事故的動(dòng)態(tài)與靜態(tài)因素的分析��,在沖突造成損害結(jié)果后明晰歸責(zé)主體�����。
關(guān)鍵詞:人機(jī)共駕�����;“電車(chē)難題”�;自動(dòng)駕駛系統(tǒng)���;最小風(fēng)險(xiǎn)管理義務(wù)��;緊急避險(xiǎn)
一����、問(wèn)題之提出:人機(jī)共駕下的“電車(chē)難題”
“電車(chē)難題”一直是學(xué)界所探討的話題。通常所討論的“電車(chē)難題”(the “trolley problem”)���,是由哲學(xué)家菲利帕·富特(Philippa Foot)在20世紀(jì)60年代提出的一個(gè)假想案例:一輛失控的電車(chē)倘若在既定的軌道上繼續(xù)行駛���,會(huì)撞死軌道上的五個(gè)人,而假設(shè)此時(shí)司機(jī)將電車(chē)轉(zhuǎn)向另一條軌道�,則只會(huì)撞死該軌道上的一個(gè)人,已知此六個(gè)人絕對(duì)平等����,不存在任何方面的差異,此時(shí)該如何選擇����。
自動(dòng)駕駛系統(tǒng)本有希望通過(guò)算法的運(yùn)行,使機(jī)動(dòng)車(chē)在面對(duì)兩難困境下瞬間作出最優(yōu)解��,然而囿于當(dāng)前的技術(shù)�����,面對(duì)“電車(chē)難題”���,自動(dòng)駕駛系統(tǒng)作出的反應(yīng)依然會(huì)受到法律以及倫理方面的詰難�。工信部發(fā)布的《汽車(chē)駕駛自動(dòng)化分級(jí)》將汽車(chē)自動(dòng)駕駛系統(tǒng)層級(jí)大致分為六種,實(shí)際上��,受當(dāng)前技術(shù)與規(guī)范的限制�,自動(dòng)駕駛系統(tǒng)的最高限度為3級(jí),即在大多數(shù)情況下主要由自動(dòng)駕駛系統(tǒng)負(fù)責(zé)駕駛機(jī)動(dòng)車(chē)���,但依然離不開(kāi)駕駛者的監(jiān)督���。換言之,駕駛者依然需要在自動(dòng)駕駛系統(tǒng)駕駛期間保持高度警惕��,以隨時(shí)應(yīng)對(duì)突發(fā)情況�。本文所探討的便是此種人機(jī)共駕模式��。
從本質(zhì)出發(fā)���,“電車(chē)難題”實(shí)際上是緊急情況下不同價(jià)值判斷之間的沖突���。在人機(jī)共駕模式下,對(duì)結(jié)果發(fā)生起決定作用的是駕駛者與自動(dòng)駕駛系統(tǒng)��。因此,當(dāng)面臨緊急情況且無(wú)法同時(shí)保全駕駛者的生命與公共安全時(shí)�,依然關(guān)涉到上述兩主體內(nèi)部及其相互之間的選擇與差異。故而人機(jī)共駕模式下的“電車(chē)難題”愈發(fā)復(fù)雜���,概括來(lái)講��,囊括三種沖突:自動(dòng)駕駛系統(tǒng)內(nèi)部所面臨的價(jià)值沖突�、駕駛者自救行為在適用規(guī)范上的沖突以及二者之間的沖突���。
二����、問(wèn)題之內(nèi)核:人機(jī)共駕下沖突的若干類(lèi)型
人機(jī)共駕模式下的“電車(chē)難題”的內(nèi)核是自動(dòng)駕駛系統(tǒng)的最小風(fēng)險(xiǎn)管理義務(wù)同駕駛者緊急避險(xiǎn)之間不同的沖突�����。本部分以此為線索�����,詳細(xì)分析人機(jī)共駕模式中沖突的具體情形��。
(一)履行最小風(fēng)險(xiǎn)管理義務(wù)面臨價(jià)值沖突
由于我國(guó)目前在規(guī)范層面僅規(guī)定了自動(dòng)駕駛系統(tǒng)在道路上測(cè)試與示范應(yīng)用時(shí)應(yīng)當(dāng)注意的事項(xiàng), 同時(shí)鑒于德國(guó)在自動(dòng)駕駛的事故歸責(zé)領(lǐng)域作出了較多有益的貢獻(xiàn)���,因此本文主要借鑒德國(guó)《自動(dòng)網(wǎng)聯(lián)駕駛戰(zhàn)略》(Strategie Automatisiertes und Vernetztes Fahren)及《自動(dòng)駕駛法》的相關(guān)內(nèi)容�,總結(jié)得出����,最小風(fēng)險(xiǎn)管理義務(wù)是指當(dāng)面臨緊急狀態(tài),且駕駛者無(wú)法反應(yīng)過(guò)來(lái)時(shí)�,需要由自動(dòng)駕駛系統(tǒng)替駕駛者作出選擇,以保護(hù)交通安全的義務(wù)�。
事實(shí)上,最小風(fēng)險(xiǎn)管理義務(wù)存在單獨(dú)適用的情形�。在此情形中,從發(fā)生交通事故開(kāi)始�,直到緊急情況結(jié)束后,駕駛者始終未能作出反應(yīng)�,而是完全由自動(dòng)駕駛系統(tǒng)按最小風(fēng)險(xiǎn)管理義務(wù)作出判斷。此時(shí)沖突僅存在于最小風(fēng)險(xiǎn)管理義務(wù)內(nèi)部�,即當(dāng)面臨緊急情況且必須在保護(hù)駕駛者安全和公共安全之間作出選擇時(shí),自動(dòng)駕駛系統(tǒng)應(yīng)當(dāng)如何抉擇���。
在人機(jī)共駕中,要求駕駛者一直保持警惕的注意義務(wù)���,不僅違反了人的生理要求�,而且與技術(shù)本身的設(shè)定初衷相悖?���!白詣?dòng)化偏見(jiàn)”(automation bias)理論認(rèn)為,由于自動(dòng)化決策具備高效率及準(zhǔn)確性��,導(dǎo)致很多人誤認(rèn)為自動(dòng)系統(tǒng)是更值得信賴(lài)的�����。自動(dòng)駕駛系統(tǒng)依托自身的運(yùn)算模型�����,通過(guò)與道路攝像頭等信息的交互����,以及對(duì)車(chē)輛端口的實(shí)時(shí)監(jiān)測(cè),實(shí)現(xiàn)對(duì)交通風(fēng)險(xiǎn)的提前預(yù)知與防范�����。駕駛者即便被告知要保持注意義務(wù)�,也難免會(huì)基于對(duì)自動(dòng)駕駛系統(tǒng)的“偏見(jiàn)”而精神懈怠。同時(shí),此處所探討的并非“算法偏見(jiàn)”(algorithmic bias):“違反公認(rèn)的規(guī)范��、法律或道德原則而對(duì)數(shù)據(jù)進(jìn)行有偏處理”����,其邏輯前提是系統(tǒng)本身存在意識(shí)。然而本文所探討的自動(dòng)駕駛系統(tǒng)�����,其運(yùn)行程序依然無(wú)法跳脫出設(shè)計(jì)者所制定的程序框架�����。因此����,在歸責(zé)時(shí)也會(huì)順理成章地指向自動(dòng)駕駛系統(tǒng)的設(shè)計(jì)者、廠商等責(zé)任主體�。
根據(jù)自動(dòng)駕駛系統(tǒng)的設(shè)計(jì)倫理,自動(dòng)駕駛系統(tǒng)的底層邏輯是以保護(hù)人的生命為第一要義的���。然而�,對(duì)于此處所保護(hù)的“人”的含義���,存在兩個(gè)命題:第一�����,在保護(hù)駕駛者生命的前提下���,最大限度保護(hù)他人的生命;第二��,在同等意義上保護(hù)所有人�。此兩種理解得出的結(jié)果截然相反,并且似乎均無(wú)法跳脫出“電車(chē)難題”所筑起的倫理籬笆����。其一,倘若依照第一個(gè)命題繼續(xù)延展����,自動(dòng)駕駛系統(tǒng)在面對(duì)沖突時(shí)會(huì)選擇犧牲公共安全去保護(hù)駕駛者的生命。出于產(chǎn)品銷(xiāo)售角度考慮���,這樣的程序應(yīng)當(dāng)是商家的首選�����, 對(duì)于消費(fèi)者而言更是如此����。但如此一來(lái),基于智能化技術(shù)自身精密的運(yùn)算能力及反應(yīng)速度��,為努力保護(hù)駕駛者的生命安全���,自動(dòng)駕駛系統(tǒng)可以更加精準(zhǔn)地犧牲公共安全���,這便會(huì)面臨倫理學(xué)上的詰責(zé),且容易造成公眾的恐慌�。其二,假設(shè)依據(jù)第二個(gè)理解進(jìn)一步推演�,從功利主義角度出發(fā),當(dāng)保護(hù)駕駛者安全與保護(hù)公共安全發(fā)生沖突時(shí)�,自動(dòng)駕駛系統(tǒng)會(huì)根據(jù)預(yù)設(shè)的系統(tǒng)保護(hù)公共安全。但從商業(yè)角度出發(fā)���,此種理念會(huì)影響自動(dòng)駕駛系統(tǒng)的銷(xiāo)售�,畢竟消費(fèi)者是基于信賴(lài)“自動(dòng)駕駛系統(tǒng)可以保護(hù)自身生命”而購(gòu)買(mǎi)產(chǎn)品的�����,而非其他原因。
(二)駕駛者自救行為適用緊急避險(xiǎn)的沖突
本情形是指當(dāng)面臨緊急情況時(shí)�����,駕駛者在第一時(shí)間控制機(jī)動(dòng)車(chē)��,并不存在自動(dòng)駕駛系統(tǒng)履行最小風(fēng)險(xiǎn)管理義務(wù)的空間�����?���;谇笊囊庵?���,駕駛者的選擇必然是為保護(hù)自身安全這一目的所服務(wù)的。此時(shí)的沖突在于�����,駕駛者的自救行為能否得到法規(guī)范的容許����,即駕駛者“舍他人為己”的行為能否得到規(guī)范的認(rèn)可�����。
從形式上來(lái)看����,駕駛者的自救行為符合緊急避險(xiǎn)的避險(xiǎn)意圖�、避險(xiǎn)時(shí)間及相當(dāng)性條件。據(jù)此��,此種情形下的沖突進(jìn)一步具象為此時(shí)駕駛者的自救行為能否符合緊急避險(xiǎn)的其他條件:
一是駕駛者的行為構(gòu)成緊急避險(xiǎn)的因從何來(lái)���。區(qū)別于自然力量��、動(dòng)物侵襲�、非法侵害行為及人的生理病理原因等緊急避險(xiǎn)的常見(jiàn)起因��,對(duì)于本文所探討的緊急情況���,是否存在緊急避險(xiǎn)的起因存在疑問(wèn)��。當(dāng)事故發(fā)生時(shí)���,駕駛者第一時(shí)間接管機(jī)動(dòng)車(chē)��,由于駕駛者之前并未操控機(jī)動(dòng)車(chē)�,因此其本身的行為并不是造成緊急情況的原因���,而是由自動(dòng)駕駛系統(tǒng)或者機(jī)動(dòng)車(chē)之外的其他因素所導(dǎo)致的�。
二是駕駛者的行為是否成立避險(xiǎn)過(guò)當(dāng)�����。對(duì)于犧牲公共安全保全自己生命的行為的性質(zhì)�,學(xué)界存在爭(zhēng)議���。有觀點(diǎn)認(rèn)為�����,由于生命無(wú)法衡量����,因此該行為不能認(rèn)定為違法阻卻事由�����,而是應(yīng)認(rèn)定為阻卻責(zé)任的緊急避險(xiǎn)。也有觀點(diǎn)主張����,此種行為無(wú)論如何也無(wú)法成立責(zé)任阻卻事由,而是應(yīng)成立違法阻卻事由��。究其原因����,責(zé)任阻卻事由的根據(jù)在于期待可能性,而期待可能性需要結(jié)合當(dāng)時(shí)的實(shí)際情況方可判斷����。本文支持此種觀點(diǎn),對(duì)此將在下文詳細(xì)展開(kāi)��。
(三)履行最小風(fēng)險(xiǎn)管理義務(wù)與駕駛者自救行為的沖突
在自動(dòng)駕駛系統(tǒng)對(duì)緊急情況履行最小風(fēng)險(xiǎn)管理義務(wù)之后����,緊急情況得到解決之前,駕駛者反應(yīng)過(guò)來(lái)并接管機(jī)動(dòng)車(chē)��。具體情形如圖1����。
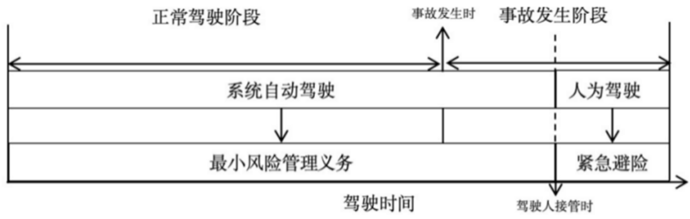
圖1 最小風(fēng)險(xiǎn)管理義務(wù)與緊急避險(xiǎn)沖突情形示例
面對(duì)可能存在的疑問(wèn):當(dāng)自動(dòng)駕駛系統(tǒng)履行最小風(fēng)險(xiǎn)管理義務(wù)之后�����,駕駛者為何還可以掌控方向盤(pán)實(shí)施自救行為����?本文認(rèn)為�,原因有二:一是基于歸責(zé)方面的考慮。最小風(fēng)險(xiǎn)管理義務(wù)設(shè)立的初衷是在駕駛者無(wú)法反應(yīng)過(guò)來(lái)時(shí)�����,最大限度地保障“人”的安全���,否則便會(huì)受到來(lái)自規(guī)范及道德等方面的苛責(zé)。然而����,倘若此時(shí)駕駛者掌控機(jī)動(dòng)車(chē)作出選擇,并造成相應(yīng)的損害結(jié)果��,從自動(dòng)駕駛系統(tǒng)的角度出發(fā)�����,便會(huì)擺脫歸責(zé)方面的困擾。二是有利于尊重與保護(hù)駕駛者自救的權(quán)利�����。當(dāng)駕駛者在面臨困境時(shí)���,理應(yīng)允許其保護(hù)自身的安全��,而非任由自動(dòng)駕駛系統(tǒng)的選擇而致使駕駛者陷入絕望的境地���。據(jù)此,如圖1����,當(dāng)駕駛者在此情形中接管機(jī)動(dòng)車(chē)后,可能會(huì)出現(xiàn)兩種情況:
其一�����,自動(dòng)駕駛系統(tǒng)所作出的選擇同駕駛者的判斷一致���。此時(shí)駕駛者在接管機(jī)動(dòng)車(chē)后�,依然會(huì)遵循自動(dòng)駕駛系統(tǒng)的選擇,并不會(huì)作出改變���。本文認(rèn)為��,此種情形并不存在沖突��,對(duì)于造成損害結(jié)果的��,根據(jù)客觀歸責(zé)理論即可解決責(zé)任分配問(wèn)題�。
其二���,自動(dòng)駕駛系統(tǒng)所作出的選擇同駕駛者的判斷相左���,且造成了較為嚴(yán)重的損害后果。此種情形亦是本文所討論的核心問(wèn)題����。而造成此種情形的原因�����,主要便是自動(dòng)駕駛系統(tǒng)在履行最小風(fēng)險(xiǎn)管理義務(wù)后����,在保護(hù)公共安全與駕駛者安全產(chǎn)生沖突時(shí)�����,選擇保護(hù)前者���。但駕駛者在接管機(jī)動(dòng)車(chē)后,基于保護(hù)自身安全的考慮���,選擇犧牲公共安全保護(hù)自己��。此時(shí)的沖突不僅囊括自動(dòng)駕駛系統(tǒng)的判斷立場(chǎng)���,同時(shí)還關(guān)涉駕駛者的價(jià)值判斷。
由此��,不難看出���,本部分沖突的情形實(shí)則是建立在對(duì)上述兩種沖突分析的基礎(chǔ)上�����,依照邏輯循序漸進(jìn)得來(lái)的�。換言之,倘若人機(jī)共駕下的沖突是數(shù)學(xué)中的“二元一次方程”���,則上述兩種沖突的立場(chǎng)便是其中的未知數(shù)��,只有確定未知數(shù)的條件���,才可以進(jìn)一步推導(dǎo)方程式。
綜上��,除兩主體內(nèi)部及相互之間的沖突本身之外��,本文所討論的沖突還關(guān)涉對(duì)不同情形下的結(jié)果予以歸責(zé)的問(wèn)題���。其一����,當(dāng)只有自動(dòng)駕駛系統(tǒng)履行最小風(fēng)險(xiǎn)管理義務(wù)與駕駛者的自救行為單獨(dú)發(fā)揮作用時(shí)�,對(duì)于造成的損害結(jié)果的責(zé)任,是否應(yīng)當(dāng)由各自行為的主體承擔(dān)�����。其二���,當(dāng)自動(dòng)駕駛系統(tǒng)履行最小風(fēng)險(xiǎn)管理義務(wù)與駕駛者的自救行為對(duì)結(jié)果的發(fā)生先后發(fā)揮作用時(shí)���,對(duì)造成的損害結(jié)果的責(zé)任,是否應(yīng)當(dāng)由雙方主體承擔(dān)���,以及分別應(yīng)當(dāng)在多大程度上承擔(dān)責(zé)任�����,均是下文在對(duì)沖突進(jìn)行調(diào)和之后需要論證的問(wèn)題���。
三、履行最小風(fēng)險(xiǎn)管理義務(wù)之調(diào)和與歸責(zé)
基于自動(dòng)駕駛系統(tǒng)的設(shè)計(jì)初衷��,即保護(hù)交通安全的功能��, 最小風(fēng)險(xiǎn)管理義務(wù)是自動(dòng)駕駛系統(tǒng)必不可少的�����。據(jù)此�,本部分旨在確立與調(diào)和最小風(fēng)險(xiǎn)管理義務(wù)價(jià)值立場(chǎng)的基礎(chǔ)上,論證其可以適用的出罪理論及歸責(zé)路徑��。
(一)最小風(fēng)險(xiǎn)管理義務(wù)以公共安全為優(yōu)位
從技術(shù)層面來(lái)講,最小風(fēng)險(xiǎn)管理義務(wù)的底層邏輯是在道路使用者之間公平分配危險(xiǎn)��,在面臨緊急情況時(shí)���,基于駕駛者自身所處的場(chǎng)域及情形��,以保護(hù)公共安全為首要原則����,在保持以上基礎(chǔ)的同時(shí)���,力求保護(hù)駕駛者的安全�����。然而可以預(yù)見(jiàn)到的是����,此項(xiàng)原則的確立�����,必定會(huì)因?yàn)閷?duì)生命進(jìn)行衡量,而受到關(guān)于功利主義的批判�����。
目前���,各國(guó)政府及企業(yè)均立足自身的實(shí)踐和價(jià)值立場(chǎng),制定各項(xiàng)人工智能治理原則���,同時(shí)對(duì)于不同治理原則的優(yōu)先度存在差別考量�。以我國(guó)為例����,我國(guó)對(duì)于人工智能的治理原則主張倫理先行,同時(shí)要求兼具安全可控����、公平普惠、開(kāi)放包容以及和平利用等原則���,體現(xiàn)了我國(guó)事先對(duì)人工智能的風(fēng)險(xiǎn)管控�����。當(dāng)然�����,出于價(jià)值論方面的考慮����,各原則在具體情形中發(fā)揮的主要作用也各有不同。以上原則可稱(chēng)為“軟法”��,即雖然缺乏強(qiáng)制力和執(zhí)行力�����,但可以在社會(huì)運(yùn)轉(zhuǎn)過(guò)程中發(fā)揮其實(shí)效的規(guī)范��。據(jù)此���,本文根據(jù)最小風(fēng)險(xiǎn)管理義務(wù)的技術(shù)特點(diǎn)及緊急情況的現(xiàn)實(shí)因素����,擬從安全原則����、公平原則和倫理原則出發(fā),分析最小風(fēng)險(xiǎn)管理義務(wù)應(yīng)當(dāng)堅(jiān)持公共安全優(yōu)位的原因。
首先是安全原則��。安全原則要求人工智能的設(shè)定以保護(hù)人類(lèi)的安全為前提����,同時(shí)在此基礎(chǔ)上�,還需平衡利益與風(fēng)險(xiǎn),在整體上實(shí)現(xiàn)社會(huì)的安全性����。從技術(shù)進(jìn)步的角度出發(fā),自動(dòng)駕駛系統(tǒng)不僅要提升駕駛者的安全系數(shù)�,也需要肩負(fù)起提升整個(gè)社會(huì)交通安全系數(shù)的使命。然而���,最小風(fēng)險(xiǎn)管理義務(wù)傾向于保護(hù)公共安全的原因在于����,面對(duì)緊急情況時(shí)�����,駕駛者坐于車(chē)內(nèi)��,在安全帶及安全氣囊等設(shè)備的保護(hù)下,駕駛者保持安全或生還的概率較沒(méi)有任何保護(hù)措施的公共人員而言要高�。
其次是公平原則。公平原則的實(shí)質(zhì)在于消除歧視�,即禁止在設(shè)定程序時(shí)對(duì)不同群體產(chǎn)生主觀上的歧視。該原則與倫理學(xué)中的社會(huì)平衡原則相類(lèi)似�����,后者要求創(chuàng)設(shè)“(獲得發(fā)展的)機(jī)會(huì)平等”��。盡管二者存在差異���,但以此理念似乎可以用來(lái)解釋此處平等原則中“不歧視”的含義�����,即當(dāng)面臨緊急情況時(shí)�,與此所關(guān)涉的所有人都應(yīng)當(dāng)具有使自己生命得到保障的權(quán)利���。出于求生欲��,駕駛者在面臨緊急情況時(shí)會(huì)本能地選擇保護(hù)自己的生命��,而此時(shí)若假設(shè)最小風(fēng)險(xiǎn)管理義務(wù)依然選擇保護(hù)駕駛者的安全�����,那么最終的結(jié)論必定是唯一的����,即公共安全將一直作為被犧牲的對(duì)象,這顯然是與公平原則理念不相符合的���。據(jù)此����,最小風(fēng)險(xiǎn)管理義務(wù)理應(yīng)保護(hù)公共安全���,為公眾保留“機(jī)會(huì)”。
最后是倫理原則�。由于倫理的概念較為模糊,因此與其只針對(duì)特定問(wèn)題探討����,不如據(jù)此得出具有共識(shí)性的判斷意識(shí)及方法。黑格爾曾指出:“(倫理是)活的善��,這活的善在自我意識(shí)中具有它的知識(shí)和意志��,通過(guò)自我意識(shí)的行動(dòng)而達(dá)到它的現(xiàn)實(shí)性?!?然而事實(shí)上,“善”的概念(也稱(chēng)為“非工具價(jià)值的東西” )與“公平”是存在沖突的�, 尤其是在生命衡量的問(wèn)題上,如何維護(hù)“公平”����,始終存在爭(zhēng)議。最為典型的便是功利主義的觀點(diǎn)�����,認(rèn)為以犧牲少數(shù)人生命以保護(hù)多數(shù)人生命的行為����,可以作出罪處理。但如此的超個(gè)人主義做法�����,即“公共利益先于個(gè)人利益的理念” ��,必然會(huì)導(dǎo)致多數(shù)人對(duì)少數(shù)人的暴政�。據(jù)此,本文的出發(fā)點(diǎn)并非基于功利主義�,而是強(qiáng)調(diào)將“主體價(jià)值判斷的權(quán)利和責(zé)任統(tǒng)一歸還為實(shí)際的主體” �,從責(zé)任以及交通秩序的角度加以考量�����。其一�,從責(zé)任出發(fā),自動(dòng)駕駛系統(tǒng)不僅要對(duì)駕駛者的生命承擔(dān)責(zé)任�,同時(shí)也要對(duì)公共安全承擔(dān)責(zé)任。而后者對(duì)于廠商而言�,無(wú)疑是更為沉重的負(fù)擔(dān),因此也會(huì)更加促使設(shè)計(jì)者不斷更新技術(shù)��,以減輕自身可能承受的法律負(fù)擔(dān)���。其二,對(duì)交通秩序而言���,倘若將最小風(fēng)險(xiǎn)管理義務(wù)以保護(hù)駕駛者生命為優(yōu)先的消息廣而告之��,會(huì)導(dǎo)致公眾對(duì)自身交通安全的恐慌����,畢竟無(wú)人會(huì)不擔(dān)心自己成為被犧牲的對(duì)象�����。
(二)履行最小風(fēng)險(xiǎn)管理義務(wù)的行為不能適用緊急避險(xiǎn)
有觀點(diǎn)認(rèn)為,人機(jī)共駕模式下“電車(chē)難題”式的碰撞選擇可以適用緊急避險(xiǎn)的原理�����。然而本文認(rèn)為�����,此種觀點(diǎn)存在值得商榷之處��,履行最小風(fēng)險(xiǎn)管理義務(wù)的行為與緊急避險(xiǎn)之間存在著本質(zhì)區(qū)別���。
其一�,履行最小風(fēng)險(xiǎn)管理義務(wù)的主體與緊急避險(xiǎn)的主體不同����。最小風(fēng)險(xiǎn)管理義務(wù)盡管為自動(dòng)駕駛系統(tǒng)事先設(shè)定好的程序,然而其依然是由設(shè)計(jì)者在根據(jù)法律規(guī)范�、公司章程以及自身的價(jià)值判斷等約束的基礎(chǔ)上制定而成的��,換言之����,此種情形下對(duì)“電車(chē)難題”的判斷,依然是“人”(設(shè)計(jì)者)自身決斷的映射����。盡管設(shè)計(jì)者同樣是受法律約束的自然人,但由于其歸根結(jié)底并不能完全替代面對(duì)緊急情況時(shí)的駕駛者���,因此站在不同立場(chǎng)時(shí)作出的判斷也可能存在差異����。
其二��,最小風(fēng)險(xiǎn)管理義務(wù)的判斷邏輯同避險(xiǎn)意識(shí)的內(nèi)容也可能存在分歧���。避險(xiǎn)意識(shí)考量的是國(guó)家����、公共利益����、本人或者他人等多個(gè)主體之間的利益�����。由于主體的差異,倘若將緊急避險(xiǎn)適用于履行最小風(fēng)險(xiǎn)管理義務(wù)的行為���,那么設(shè)計(jì)者同駕駛者得出的選擇便會(huì)出現(xiàn)分歧���。第一,對(duì)于設(shè)計(jì)者���,假設(shè)以保護(hù)駕駛者的生命為前提���,適用的便是“為保護(hù)他人利益”,犧牲公共安全����。第二,對(duì)于駕駛者而言�����,由于自救的潛意識(shí)��,駕駛者一般均會(huì)選擇保全自己的性命���,因此適用的便是“為保護(hù)本人利益”����,犧牲公共利益。不難看出�,兩個(gè)選項(xiàng)之間存在明顯分歧,且可能會(huì)導(dǎo)致對(duì)駕駛者合法利益的過(guò)度侵犯����。倘若自動(dòng)駕駛系統(tǒng)預(yù)先根據(jù)保護(hù)公共安全作出了判斷,由于此時(shí)履行最小風(fēng)險(xiǎn)管理義務(wù)的行為同樣適用緊急避險(xiǎn)���,此時(shí)駕駛者便無(wú)法對(duì)自動(dòng)駕駛系統(tǒng)的判斷再次實(shí)施緊急避險(xiǎn)�����。原因在于���,緊急避險(xiǎn)的起因之一是非法侵害,而此時(shí)履行最小風(fēng)險(xiǎn)管理義務(wù)的行為得到了規(guī)范上的肯定���,因此駕駛者的自救行為反而無(wú)法可依���,這明顯是不合適的�����。
(三)履行最小風(fēng)險(xiǎn)管理義務(wù)的行為不能適用容許的風(fēng)險(xiǎn)理論
有學(xué)者認(rèn)為,倘若損害結(jié)果是由于自動(dòng)駕駛系統(tǒng)之外的偶然因素所造成的��,此時(shí)便無(wú)法苛責(zé)自動(dòng)駕駛系統(tǒng)的設(shè)計(jì)者未盡到注意義務(wù)�,也不能將造成的損害結(jié)果歸責(zé)于設(shè)計(jì)者。換言之�����,該說(shuō)主張通過(guò)容許的風(fēng)險(xiǎn)理論降低對(duì)設(shè)計(jì)者注意義務(wù)的限制�,當(dāng)自動(dòng)駕駛系統(tǒng)面對(duì)超出其自身設(shè)定程序之外的偶然情形時(shí),便不能苛責(zé)設(shè)計(jì)者承擔(dān)超出其注意義務(wù)的責(zé)任�。本文部分贊同該說(shuō)的觀點(diǎn),由自動(dòng)駕駛系統(tǒng)造成損害結(jié)果的歸責(zé)主體的確應(yīng)當(dāng)是設(shè)計(jì)者���。但是本文認(rèn)為�����,該觀點(diǎn)還存在值得商榷之處����。
其一,偶然因素及設(shè)計(jì)者注意義務(wù)的外延難以界定����。第一,偶然因素的標(biāo)準(zhǔn)難以確定���。鑒于道路交通的復(fù)雜情形��,界定哪些因素是偶然因素是難以實(shí)現(xiàn)的�����。行之有效的方法是�����,制定出一個(gè)原則性的規(guī)范�,并在今后的技術(shù)發(fā)展革新中不斷加以完善�����。然而此種方式存在顯著的弊端:一是原則性的規(guī)范較為模糊�,并不適合作為判斷具體情形的標(biāo)準(zhǔn);二是技術(shù)的發(fā)展具備不確定性�����,未來(lái)會(huì)行至何方�����,終究難以預(yù)估�。因此,將來(lái)所要形成的標(biāo)準(zhǔn)也游離于當(dāng)前的現(xiàn)實(shí)之外�。第二,設(shè)計(jì)者注意義務(wù)的外延難以框定����。對(duì)于注意義務(wù)的標(biāo)準(zhǔn)人,我國(guó)的通說(shuō)認(rèn)為應(yīng)以行為人和一般人的標(biāo)準(zhǔn)相統(tǒng)一(也稱(chēng)折中說(shuō))����, 也有學(xué)者主張應(yīng)當(dāng)以行為人本人的標(biāo)準(zhǔn)為唯一判斷標(biāo)準(zhǔn)(一元行為人標(biāo)準(zhǔn)說(shuō))。本文支持后者��。據(jù)此����,即便存在程序設(shè)定的基準(zhǔn),且并非一切可預(yù)見(jiàn)的風(fēng)險(xiǎn)都足以證成預(yù)見(jiàn)義務(wù)���,但每個(gè)設(shè)計(jì)者的能力不同�����,難免會(huì)存在程序設(shè)定上的差別�。此時(shí)如何錨定具體設(shè)計(jì)者的注意義務(wù)也是擺在此說(shuō)面前的難題。
其二����,適用容許的風(fēng)險(xiǎn)理論會(huì)導(dǎo)致自動(dòng)駕駛技術(shù)進(jìn)步的滯緩。對(duì)于新興技術(shù)���,尤其是對(duì)交通便利及安全大有裨益的技術(shù)革新����,應(yīng)當(dāng)保持包容的態(tài)度����。這本無(wú)可厚非,根據(jù)“科技主義優(yōu)先論”��,國(guó)家及社會(huì)的發(fā)展依賴(lài)于科技進(jìn)步�,對(duì)科技設(shè)限過(guò)多(如“刑法規(guī)制優(yōu)先論”),不利于科學(xué)技術(shù)的蓬勃發(fā)展��。然而,倘若沿用容許的風(fēng)險(xiǎn)理論�����,可能會(huì)將本屬于自動(dòng)駕駛系統(tǒng)設(shè)計(jì)者的責(zé)任�����,轉(zhuǎn)移給復(fù)雜的交通運(yùn)輸情形�,長(zhǎng)此以往反而不利于自動(dòng)駕駛系統(tǒng)的進(jìn)步����。換言之,“科技主義優(yōu)先論”的出發(fā)點(diǎn)是保持與科技進(jìn)步帶來(lái)的風(fēng)險(xiǎn)相適中的刑罰����,從而在合法合規(guī)的路徑上高速發(fā)展。但假若一味對(duì)科技進(jìn)步采用寬容甚至縱容的態(tài)度��,使得技術(shù)擁有者獲得的利益與承擔(dān)的風(fēng)險(xiǎn)之間明顯失衡時(shí)�,不僅無(wú)法保障科技平穩(wěn)進(jìn)步,反而適得其反��,使得“科技主義優(yōu)先”變?yōu)榱恕翱萍歼M(jìn)步阻卻”��。
(四)結(jié)論
在最小風(fēng)險(xiǎn)管理義務(wù)以公共安全為優(yōu)位的路徑下,對(duì)于履行最小風(fēng)險(xiǎn)管理義務(wù)造成駕駛者重傷或死亡結(jié)果的責(zé)任����,應(yīng)當(dāng)歸結(jié)為自動(dòng)駕駛系統(tǒng)的廠商及設(shè)計(jì)者。其一�����,自動(dòng)駕駛系統(tǒng)的設(shè)計(jì)者作為直接責(zé)任人員�,需要根據(jù)行為當(dāng)時(shí)的具體情形,分析其是否缺乏期待可能性�����。倘若還存在其他可以保全駕駛者安全的方式��,但設(shè)計(jì)者忽略的���,因而導(dǎo)致駕駛者傷亡的����,設(shè)計(jì)者需承擔(dān)過(guò)失致人死亡的責(zé)任���。其二����,對(duì)于單位犯罪,自動(dòng)駕駛系統(tǒng)廠商除根據(jù)具體情況��,在承擔(dān)具體罪名罰金的同時(shí)���,也需對(duì)駕駛者或其家人承擔(dān)相應(yīng)的民事?lián)p害賠償�����。
四、駕駛者自救行為之分析與歸責(zé)
面對(duì)人機(jī)共駕下的“電車(chē)難題”時(shí)���,由于駕駛者求生的意志與避險(xiǎn)意識(shí)較為類(lèi)似�,若尋求法規(guī)范的認(rèn)可�����,通過(guò)緊急避險(xiǎn)加以分析與歸責(zé)的路徑無(wú)疑是最為合適的��。
(一)駕駛者自救行為適用緊急避險(xiǎn)之前提
從價(jià)值層面出發(fā)���,駕駛者的自救行為似乎情有可原�。但事實(shí)上,除客觀上造成了損害公共安全的結(jié)果之外���,駕駛者在主觀上也具備間接故意或過(guò)失����。
其一�����,駕駛者在部分情形中依然存在成立間接故意的可能���。在部分情形中��,當(dāng)駕駛者面對(duì)緊急情況甚至不知道自己所轉(zhuǎn)向的方向是否存在危害公共安全的危險(xiǎn)時(shí)��,此時(shí)何談具備故意的認(rèn)識(shí)因素��。但也需要承認(rèn)�����,在部分情況中駕駛者的確具備認(rèn)識(shí)因素���,雖然不會(huì)希望損害公共安全�,但依然會(huì)對(duì)此結(jié)果采取放任的心態(tài)��。
其二���,駕駛者也仍舊存在成立交通肇事罪的可能����,只是對(duì)其判定的要求要相應(yīng)降低�����。當(dāng)3級(jí)自動(dòng)駕駛系統(tǒng)面對(duì)緊急情況發(fā)出接管請(qǐng)求時(shí)���,囿于技術(shù)層面的限制,駕駛者仍需保持注意義務(wù)����。因此對(duì)于未能及時(shí)接管或未能及時(shí)避免,因而造成損害的���,駕駛者存在過(guò)失�,構(gòu)成交通肇事罪。但同時(shí)��,自動(dòng)駕駛系統(tǒng)的出現(xiàn)���,勢(shì)必會(huì)在一定程度上改變先前以駕駛者作為判斷中心的方式�,影響以往對(duì)駕駛者行為是否違規(guī)的判斷�����。換言之��,在面對(duì)道路上的突發(fā)情況時(shí)���,由于自動(dòng)駕駛系統(tǒng)對(duì)車(chē)輛的控制�,使得駕駛者的觀察���、反應(yīng)及判斷能力降低�����,駕駛者的注意義務(wù)當(dāng)然地會(huì)受到限縮�。
據(jù)此���,駕駛者的主觀因素依然存在入罪的可能�。同時(shí),在駕駛者選擇背后所蘊(yùn)含著的基于求生而選擇犧牲公共安全的主觀心態(tài)����,或許可以作為避險(xiǎn)意識(shí),成為適用緊急避險(xiǎn)的契機(jī)�。因此在本文所探討的情形中,緊急避險(xiǎn)便是唯一可擔(dān)駕駛者自救行為出罪“重任”的路徑���。
(二)駕駛者自救行為適用緊急避險(xiǎn)之確立
對(duì)于駕駛者的自救行為�����,尤其是對(duì)于本情形所討論的犧牲他人生命的行為能否適用緊急避險(xiǎn)的前提��,便是需要分析其行為是否符合緊急避險(xiǎn)的理論根基����。
首先���,社會(huì)相當(dāng)性無(wú)法成為理論根基。社會(huì)相當(dāng)性說(shuō)以有關(guān)違法性本質(zhì)的規(guī)范違反說(shuō)為前提����,認(rèn)為只要屬于歷史性形成的社會(huì)秩序框架之內(nèi)的行為���,便可以正當(dāng)化。然而�����,社會(huì)相當(dāng)性說(shuō)并沒(méi)有明確實(shí)質(zhì)性的判斷標(biāo)準(zhǔn)�。其一,社會(huì)相當(dāng)性說(shuō)對(duì)于何為“日常性����、通常性”,并沒(méi)有明確具體的判斷標(biāo)準(zhǔn)��,無(wú)法解決具有爭(zhēng)議的問(wèn)題��。其二����,如果將社會(huì)大眾所能接受也作為其行為是否阻卻違法的標(biāo)準(zhǔn),則實(shí)際上將此判斷標(biāo)準(zhǔn)變成了社會(huì)大眾的標(biāo)準(zhǔn)��。然而對(duì)于本文討論的情形����,社會(huì)大眾基于自身的利益���,很難認(rèn)可自救行為的正當(dāng)性。
其次���,功利主義也不能成為理論根據(jù)�?�!稇椃ā返?3條第2款規(guī)定:“中華人民共和國(guó)公民在法律面前一律平等�����?����!睆囊?guī)范上而言���,基于人人平等的原則�,任何犧牲他人生命以保護(hù)自己的行為都無(wú)法得到規(guī)范上的肯定評(píng)價(jià)���。純粹從功利角度考慮�����,不僅會(huì)導(dǎo)致個(gè)人利益被無(wú)故剝奪���,同時(shí)還會(huì)引起社會(huì)利益的無(wú)限膨脹。據(jù)此���,功利主義不僅不能適用于最小風(fēng)險(xiǎn)管理義務(wù)����,同樣也不適用于駕駛者的自救行為�。
最后,自由平等原則和社會(huì)團(tuán)結(jié)原則較為合理���。前者基于法律面前人人平等原則���,主張人的生命是不可衡量的,堅(jiān)決反對(duì)為多數(shù)人生命而犧牲少數(shù)人生命的行為�,后者強(qiáng)調(diào)“公民對(duì)于社會(huì)共同體的其他成員負(fù)有一定的扶助和照顧的責(zé)任”。本文贊成此種觀念���,同時(shí)認(rèn)為��,本文所討論的駕駛者的自救行為符合此兩種理念�����。其一�,駕駛者的決定來(lái)源于駕駛者的求生意愿,其既未希望用多數(shù)人的生命來(lái)挽救自己的生命���,也并未因要保護(hù)多數(shù)人生命而放棄自己的生命�����。其二����,對(duì)于駕駛者因緊急情況而產(chǎn)生的險(xiǎn)情�����,社會(huì)共同體的成員具有一定的照顧責(zé)任�,符合社會(huì)團(tuán)結(jié)義務(wù)的構(gòu)想。當(dāng)然����,社會(huì)共同體的成員承擔(dān)的責(zé)任并非無(wú)限制的���。
(三)駕駛者自救行為適用緊急避險(xiǎn)之證成
盡管從前提條件和理論根基上已經(jīng)說(shuō)明了駕駛者的自救行為符合適用緊急避險(xiǎn)的要求,但倘若要說(shuō)明其行為足以成立緊急避險(xiǎn)��,還需從行為是否符合避險(xiǎn)起因及限度方面展開(kāi)討論���。
其一,從避險(xiǎn)起因來(lái)看�,駕駛者所面臨的危險(xiǎn)來(lái)自于他人違反交規(guī)的行為及突發(fā)情況。第一��,他人違反交規(guī)的行為���。包括但不限于行人突然從非斑馬線的位置橫跨馬路�、其他車(chē)輛發(fā)生碰撞事故后對(duì)駕駛者所處車(chē)道的威脅等情形�����。此時(shí)自動(dòng)駕駛系統(tǒng)無(wú)法根據(jù)提前量預(yù)先作出判斷���,需要由駕駛者或自動(dòng)駕駛系統(tǒng)瞬時(shí)作出反應(yīng)��,而此時(shí)面臨風(fēng)險(xiǎn)的大小又會(huì)受相對(duì)距離�、相對(duì)速度的絕對(duì)值和方向等動(dòng)態(tài)風(fēng)險(xiǎn)場(chǎng)的場(chǎng)強(qiáng)因素影響。第二����,突發(fā)情況。盡管自動(dòng)駕駛系統(tǒng)會(huì)對(duì)車(chē)輛自身狀態(tài)進(jìn)行實(shí)時(shí)監(jiān)控�����,如對(duì)車(chē)輛輪胎正常功能是否運(yùn)轉(zhuǎn)的在線評(píng)估與預(yù)警等�����。然而���,對(duì)于因惡劣氣候�、道路特定狀況引起的突發(fā)狀況�����,自動(dòng)駕駛系統(tǒng)依然難以有效躲避�。對(duì)于前者,主要指雨雪天氣路面濕滑導(dǎo)致不可控的風(fēng)險(xiǎn)增加���;對(duì)于后者��,包括諸如地面存在的玻璃����、圖釘?shù)扔绊懓踩旭偟囊蛩兀纱藢?dǎo)致的車(chē)輛側(cè)翻或脫離自動(dòng)駕駛系統(tǒng)掌控的情形���。以上均屬于駕駛者所面臨的危險(xiǎn),屬于避險(xiǎn)起因�。
其二,從避險(xiǎn)限度出發(fā)���,駕駛者的行為造成了不應(yīng)有的損害����,成立避險(xiǎn)過(guò)當(dāng)�����。利益衡量是所有緊急權(quán)的基礎(chǔ)���,而基于生命不可衡量這一理念���,同樣不能認(rèn)為駕駛者的生命高于多數(shù)人的生命���,否則這種以生命換生命的行為便是違法的。此時(shí)需要關(guān)注的����,便是雙方所代表的利益究竟哪方的“份量”更足。道路交通中不僅存在各方的生命安全法益��,同時(shí)也存在信賴(lài)原則這一與當(dāng)今交通秩序緊密相關(guān)的理念�,而此時(shí)倘若認(rèn)定駕駛者的行為符合信賴(lài)原則,無(wú)疑會(huì)對(duì)當(dāng)前正常的交通秩序產(chǎn)生難以逆轉(zhuǎn)的影響��?;诖耍婧饬康奶炱桨l(fā)生了“傾斜”����,駕駛者的行為也由此造成了不應(yīng)有的損害,構(gòu)成避險(xiǎn)過(guò)當(dāng)�。
(四)結(jié)論
在本部分所探討的問(wèn)題中,駕駛者自救行為的歸責(zé)路徑����,分成以下兩類(lèi):一是對(duì)駕駛者在條件范圍內(nèi)作出的反應(yīng)���。此時(shí)駕駛者本能的求生意志(由皮質(zhì)認(rèn)知回路)所產(chǎn)生的防御性生存系統(tǒng),會(huì)在駕駛者產(chǎn)生意識(shí)的第一瞬間操控身體作出有益于保全自身生命的做法���,完全是其作為生命個(gè)體試圖挽救自身生存的下意識(shí)舉動(dòng)�?;谝?guī)范責(zé)任論的立場(chǎng),應(yīng)當(dāng)客觀評(píng)價(jià)行為人面臨的具體情形����。此時(shí)駕駛者不具備期待可能性,排除刑事責(zé)任�。二是駕駛者晚于條件范圍內(nèi)作出的反應(yīng)����。此時(shí)駕駛者經(jīng)過(guò)權(quán)衡后,不得不選擇保護(hù)自身安全��,對(duì)此可依據(jù)期待可能性酌情減輕其刑事責(zé)任�。可見(jiàn)���,相較于第一種情形�����,駕駛者更多是基于本能意識(shí)的判斷而言�����,第二種情形中駕駛者對(duì)于自動(dòng)駕駛系統(tǒng)履行最小風(fēng)險(xiǎn)義務(wù)所導(dǎo)致的結(jié)果���,增添了更多自己的價(jià)值判斷�����。而根據(jù)責(zé)任主義����,行為人理當(dāng)對(duì)基于自由意志的行為承擔(dān)責(zé)任�, 因此駕駛者需要承擔(dān)相應(yīng)的刑事責(zé)任。
五���、駕駛者與自動(dòng)駕駛系統(tǒng)沖突之調(diào)和與歸責(zé)
在確定好未知數(shù)后��,便可以成功地解開(kāi)人機(jī)共駕沖突這一“二元一次方程”�����。上文兩主體的調(diào)和及歸責(zé)路徑����,均關(guān)涉二者有無(wú)履行注意義務(wù)以及有無(wú)期待可能性。據(jù)此�����,本部分從具體因素的視角介入���,進(jìn)一步明晰雙方發(fā)生沖突后的調(diào)和與歸責(zé)路徑�。
(一)沖突發(fā)生后的情形及理論歸責(zé)路徑的局限性
根據(jù)最小風(fēng)險(xiǎn)管理義務(wù)的運(yùn)行邏輯���,其當(dāng)且僅當(dāng)駕駛者在面對(duì)緊急情況的第一時(shí)間并未作出判斷時(shí)�����,才會(huì)發(fā)揮作用。因此��,雙方的沖突存在時(shí)間上的先后性��。據(jù)此�����,以沖突行為最后所造成的主體預(yù)期結(jié)果為依據(jù),可以將此時(shí)沖突造成的結(jié)果細(xì)化為三種:第一����,發(fā)生了自動(dòng)駕駛系統(tǒng)指向的結(jié)果。此時(shí)�,即便駕駛者采取了自救行為,但囿于干預(yù)時(shí)間過(guò)晚等原因���,依然無(wú)法改變最小風(fēng)險(xiǎn)管理義務(wù)的行為指向��。第二�����,實(shí)現(xiàn)了駕駛者所期待的結(jié)果�����。此時(shí)�,盡管已據(jù)最小風(fēng)險(xiǎn)管理義務(wù)作出了判斷�,但駕駛者的自救行為足以扭轉(zhuǎn)先前的行為。第三���,造成了既非駕駛者期待���,也非自動(dòng)駕駛系統(tǒng)指向的結(jié)果�����。顯然����,當(dāng)二者發(fā)生沖突時(shí)��,有相當(dāng)大的概率會(huì)導(dǎo)致雙方都未達(dá)成自己的目標(biāo)��。例如�,在二者發(fā)生沖突后,機(jī)動(dòng)車(chē)撞向建筑�,并同時(shí)波及公共安全,此時(shí)的結(jié)果均非雙方最初的目的��。
法律規(guī)范與基礎(chǔ)理論的分析終究存在自身的局限性�。對(duì)于以上結(jié)果的歸責(zé)與調(diào)和路徑����,依舊沿著階層論的場(chǎng)域��,對(duì)客觀歸責(zé)中的因果關(guān)系和注意義務(wù)��,依托一般性路徑予以分析�。然而當(dāng)我們結(jié)合實(shí)際時(shí)��,這一理論上的歸責(zé)路徑只能定位于“高屋建瓴”����。申言之,以上二者只是較為上層的分析范式�����,對(duì)于解決具體問(wèn)題欠缺現(xiàn)實(shí)意義�。同時(shí),在確定結(jié)果歸責(zé)后�,是否存在阻卻或減輕責(zé)任的事由,依然需要結(jié)合具體的主客觀因素加以分析���。
(二)數(shù)據(jù)分析視角下的調(diào)和與歸責(zé)路徑初探
導(dǎo)致交通事故的因素復(fù)雜且多變���。為使理論及規(guī)范的實(shí)施更加具有說(shuō)服力,本部分力求周延地整理了當(dāng)前影響交通事故的主要因素,并藉此分析自動(dòng)駕駛系統(tǒng)及駕駛者在何種因素的影響下需要對(duì)造成的交通事故承擔(dān)責(zé)任�����。
以影響交通事故的因素是否動(dòng)態(tài)變化為標(biāo)準(zhǔn)�����,可將因素分為靜態(tài)因素和動(dòng)態(tài)因素���。其中�,靜態(tài)因素包括:駕駛者本人因素����,例如駕駛者年齡、性別等�����;交通設(shè)施因素�,例如道路上的坑洞、凸起顛簸���、道路的往常事故率�����、道路的幾何設(shè)計(jì)(如傾斜路口����、曲率����、寬度不足的道路等)。動(dòng)態(tài)因素則包括:天氣因素��,如雨雪天氣�����、霧天等�;光照因素,例如白天的光照���、夜晚對(duì)向行駛車(chē)輛的遠(yuǎn)光燈以及道路本身的照明等��;異常性因素�����,例如異常的道路參與者(突然竄入道路中的行人及非機(jī)動(dòng)車(chē))等��。
需要說(shuō)明的是���,以上因素并非本文杜撰����,而是經(jīng)過(guò)對(duì)實(shí)踐數(shù)據(jù)的歸納及模型分析所得出的結(jié)論�����。本文借鑒相關(guān)學(xué)者對(duì)100輛機(jī)動(dòng)車(chē)測(cè)試的結(jié)果及分析的數(shù)據(jù)��, 分析造成交通事故的因素����,并制作圖2:
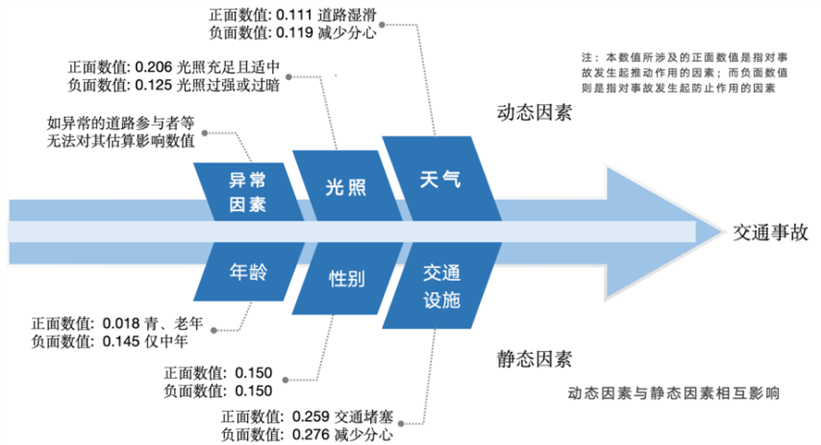
圖2 影響交通事故的動(dòng)態(tài)因素、靜態(tài)因素?cái)?shù)值
在圖2中�,動(dòng)態(tài)因素主要代表與駕駛者相關(guān)的因素,其中光照�、天氣等因素會(huì)影響駕駛者在緊急情況下的反應(yīng)時(shí)間;靜態(tài)因素主要代表與自動(dòng)駕駛系統(tǒng)相關(guān)的因素���,如年齡����、性別及交通設(shè)施等均需自動(dòng)駕駛系統(tǒng)在設(shè)定系統(tǒng)之前加以考慮,以保證避免交通事故的效率�。當(dāng)然,動(dòng)態(tài)因素并非完全與自動(dòng)駕駛系統(tǒng)無(wú)關(guān)��,靜態(tài)因素也不是直接與駕駛者脫鉤�����,而是兩類(lèi)因素具備自身的特征�,而此特征分別與駕駛者與自動(dòng)駕駛系統(tǒng)緊密關(guān)聯(lián)�。因此,本部分只能較為籠統(tǒng)地分析動(dòng)態(tài)因素與靜態(tài)因素的影響�����。同時(shí)�,二者并非相互脫離,而是如同數(shù)據(jù)分析中的常量與變量相互影響����。例如,當(dāng)路況坑洼且偶遇降雨天氣時(shí)���,道路積水下隱患會(huì)影響機(jī)動(dòng)車(chē)的走向����。再如,當(dāng)駕駛者注意力不集中且恰巧遇到道路曲率過(guò)大時(shí)�����,導(dǎo)致車(chē)輛脫離駕駛者的臨時(shí)判斷���。因此�����,動(dòng)態(tài)因素之間相互串聯(lián)�����,也會(huì)極大提升發(fā)生事故的概率�。
如圖3���,本部分通過(guò)不同象限中動(dòng)態(tài)因素與靜態(tài)因素對(duì)交通事故影響的絕對(duì)值及其交匯的點(diǎn)加以分析��。其中�����,動(dòng)態(tài)因素與靜態(tài)因素交匯處的0點(diǎn)代表未受任何因素影響下的一般情形����。在動(dòng)態(tài)因素豎軸上,0點(diǎn)以上的數(shù)值表示對(duì)交通事故的推動(dòng)作用���,0點(diǎn)以下的數(shù)值表示對(duì)交通事故的防止作用�。同理���,在靜態(tài)因素橫軸上,0點(diǎn)右側(cè)的數(shù)值表示對(duì)交通事故的推動(dòng)作用����,0點(diǎn)左側(cè)的數(shù)值表示對(duì)交通事故的防止作用。
據(jù)此�����,本部分?jǐn)M對(duì)上述影響因素進(jìn)行數(shù)據(jù)分析����,期望藉此明晰不同主體的責(zé)任�����。整體思路如下:倘若只有動(dòng)態(tài)因素或靜態(tài)因素其中之一發(fā)揮作用時(shí)�����,可以直接根據(jù)其影響數(shù)值判斷��,但假設(shè)二者相互影響時(shí)���,受不同因素的疊加推動(dòng)與互斥,會(huì)導(dǎo)致在多個(gè)維度的數(shù)值之間無(wú)法判斷決定結(jié)果的因素�。然而,本文的關(guān)注點(diǎn)并非明晰在交通事故中各因素的占比分別為多少��,而是判斷除去異常因素外����,在哪些情形中,駕駛者與自動(dòng)駕駛系統(tǒng)需要對(duì)事故結(jié)果承擔(dān)責(zé)任�。對(duì)于駕駛者而言,倘若在均為防止交通事故因素的場(chǎng)域下�����,反而造成事故,那么通過(guò)反向推導(dǎo)�����,便可能是駕駛者未履行注意義務(wù)�。同理,自動(dòng)駕駛系統(tǒng)倘若在動(dòng)態(tài)因素和駕駛者自身因素并不造成正向加功時(shí)�����,對(duì)交通設(shè)施本身未盡到提醒和規(guī)避義務(wù)也可能成為結(jié)果歸咎于自動(dòng)駕駛系統(tǒng)的誘因��。
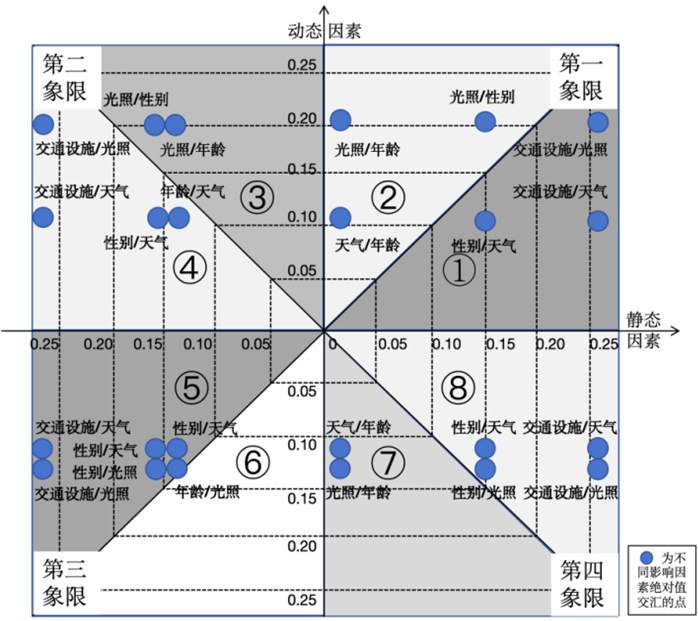
圖3 影響交通事故因素?cái)?shù)值分析
(三)調(diào)和路徑之展開(kāi):分析與歸責(zé)
本部分結(jié)合上述關(guān)于履行最小風(fēng)險(xiǎn)管理義務(wù)的行為和駕駛者自救行為的立場(chǎng)及調(diào)和路徑的探討��,系統(tǒng)且詳細(xì)地探討上述情形的具體歸責(zé)路徑�����。
1.分析:厘清注意義務(wù)界定的難點(diǎn)
本部分中的注意義務(wù)是指����,當(dāng)存在推動(dòng)或防止交通事故的情形時(shí)�����,駕駛者及自動(dòng)駕駛系統(tǒng)對(duì)緊急情況的反應(yīng)。動(dòng)態(tài)因素與靜態(tài)因素分別關(guān)涉不同主體的注意義務(wù)�����。
動(dòng)態(tài)因素影響駕駛者的反應(yīng)時(shí)間���。換言之��,以動(dòng)態(tài)因素的影響值為0時(shí)作為基準(zhǔn)�,當(dāng)處于對(duì)交通事故起推動(dòng)作用的情形時(shí)�����,駕駛者的反應(yīng)時(shí)間應(yīng)相較一般情形下的反應(yīng)時(shí)間較晚�����。駕駛者在此時(shí)間之前反應(yīng)過(guò)來(lái)����,并未違反注意義務(wù)。同理�����,當(dāng)處于對(duì)交通事故起防止作用的情形時(shí),駕駛者的反應(yīng)時(shí)間本應(yīng)較短�。倘若此時(shí)駕駛者未在一般情形下的時(shí)間內(nèi)及時(shí)反應(yīng)過(guò)來(lái),則違反了注意義務(wù)�����。
靜態(tài)因素影響自動(dòng)駕駛系統(tǒng)避免交通事故的效率���。同樣以靜態(tài)因素的影響值為0時(shí)作為基準(zhǔn)���,當(dāng)處于對(duì)交通事故起推動(dòng)作用的情形時(shí),自動(dòng)駕駛系統(tǒng)避免事故的效率相應(yīng)降低��。倘若此時(shí)自動(dòng)駕駛系統(tǒng)發(fā)揮正常的或相對(duì)較低的避免事故效率時(shí)�����,并未違反注意義務(wù)����。當(dāng)處于對(duì)交通事故起防止作用的情形時(shí)���,自動(dòng)駕駛系統(tǒng)避免事故的效率相應(yīng)提高�����。此時(shí)倘若自動(dòng)駕駛系統(tǒng)發(fā)揮較一般情形下較低或者等同的效率時(shí)�,則違反了注意義務(wù)。
據(jù)此�����,當(dāng)發(fā)生處于第一象限的情形時(shí)���,均為推動(dòng)交通事故的因素�����,對(duì)駕駛者及自動(dòng)駕駛系統(tǒng)的注意義務(wù)要求最低����。其中在區(qū)域2中��,動(dòng)態(tài)因素的影響相較于靜態(tài)因素更高���,駕駛者的注意義務(wù)要求最低��;在區(qū)域1中���,靜態(tài)因素相較于動(dòng)態(tài)因素的影響更高����,自動(dòng)駕駛系統(tǒng)的注意義務(wù)要求最低�。當(dāng)發(fā)生處于第二象限的情形時(shí),動(dòng)態(tài)因素起推動(dòng)作用�����,靜態(tài)因素起防止作用��。此時(shí)駕駛者的注意義務(wù)相對(duì)較低��,自動(dòng)駕駛系統(tǒng)的注意義務(wù)相對(duì)較高���。當(dāng)發(fā)生處于第三象限的情形時(shí)�,均為防止交通事故的因素��,駕駛者及自動(dòng)駕駛系統(tǒng)的注意義務(wù)要求最高�。同時(shí),影響因素均集中在區(qū)域5中�����,即靜態(tài)因素的影響較動(dòng)態(tài)因素更為顯著��,據(jù)此����,駕駛者與自動(dòng)駕駛系統(tǒng)的注意義務(wù)更高。當(dāng)發(fā)生處于第四象限的情形時(shí)�,動(dòng)態(tài)因素起防止作用,靜態(tài)因素起推動(dòng)作用�。此時(shí)駕駛者的注意義務(wù)相對(duì)較高,自動(dòng)駕駛系統(tǒng)的注意義務(wù)相對(duì)較低����。
2.歸責(zé):損害結(jié)果的責(zé)任歸屬
第一,對(duì)于僅造成駕駛者或最小風(fēng)險(xiǎn)管理義務(wù)所期待的結(jié)果�。即便行為本身介入了其他因素,但事實(shí)上�����,由于介入因素本身并未對(duì)結(jié)果的發(fā)生產(chǎn)生實(shí)質(zhì)性影響��,而是依然按照先前行為的軌跡進(jìn)一步發(fā)展�����。因此結(jié)果依然歸責(zé)于駕駛者或自動(dòng)駕駛系統(tǒng)單方。
其一��,對(duì)于造成駕駛者期待的結(jié)果���,此時(shí)探討駕駛者是否對(duì)公共安全損害承擔(dān)責(zé)任����。情形一:倘若此時(shí)的因素均對(duì)事故發(fā)生起推動(dòng)作用���。駕駛者按照較一般情形下較長(zhǎng)或相等的反應(yīng)時(shí)間掌控機(jī)動(dòng)車(chē)�,此時(shí)并未違反注意義務(wù)�����。例1�����,當(dāng)面對(duì)強(qiáng)光照射及路面積雪的情況下�����,駕駛者對(duì)于緊急情況的出現(xiàn)及時(shí)反應(yīng),但仍未阻止對(duì)公共安全造成損害結(jié)果的���。此時(shí)駕駛者成立避險(xiǎn)過(guò)當(dāng),但可適用期待可能性免除刑事責(zé)任����。情形二:倘若此時(shí)的因素均對(duì)事故發(fā)生起防止作用,此時(shí)駕駛者的反應(yīng)時(shí)間長(zhǎng)于一般情形的�����,駕駛者違反了注意義務(wù)���。例2��,當(dāng)光照有助于視野且無(wú)積雪的情況下����,駕駛者面對(duì)緊急情況未能及時(shí)反應(yīng)�����,最終造成公共安全損害的��,駕駛者的行為雖然也可構(gòu)成避險(xiǎn)過(guò)當(dāng),但只得根據(jù)期待可能性適當(dāng)減輕刑事責(zé)任�。
其二,對(duì)于造成自動(dòng)駕駛系統(tǒng)希望的結(jié)果���,此時(shí)討論自動(dòng)駕駛系統(tǒng)的設(shè)計(jì)者及廠商是否對(duì)駕駛者的傷亡承擔(dān)責(zé)任��。情形一:倘若此時(shí)的因素均對(duì)事故發(fā)生起推動(dòng)作用�。若履行最小風(fēng)險(xiǎn)管理義務(wù)可以發(fā)揮較一般情形下較低或相同的防止事故效率���,此時(shí)自動(dòng)駕駛系統(tǒng)的設(shè)計(jì)者及廠商并未違反注意義務(wù)�。例3��,當(dāng)路過(guò)曲率較大的路口時(shí)面臨緊急情況��,履行最小風(fēng)險(xiǎn)管理義務(wù)實(shí)現(xiàn)較在一般路口較低或相同的防止事故發(fā)生的效率����。此時(shí)表明自動(dòng)駕駛系統(tǒng)的設(shè)計(jì)者及廠商周全地考慮到了交通設(shè)施,可根據(jù)期待可能性免除其刑事責(zé)任����。情形二:倘若此時(shí)的因素均對(duì)事故發(fā)生起防止作用。若履行最小風(fēng)險(xiǎn)管理義務(wù)只能發(fā)揮較一般情形下較低的防止事故效率���,此時(shí)自動(dòng)駕駛系統(tǒng)的設(shè)計(jì)者及廠商違反了注意義務(wù)�。例4,在道路筆直且并無(wú)雷達(dá)偵測(cè)盲區(qū)的條件下面臨緊急情況時(shí)�,未能發(fā)揮正常情形下的防止事故效率。此時(shí)自動(dòng)駕駛系統(tǒng)的設(shè)計(jì)者及廠商未完全地考慮交通設(shè)施����,只得適用期待可能性適當(dāng)減輕其刑事責(zé)任�����。
第二��,對(duì)于造成雙方均未期待的結(jié)果的情形����。此時(shí)需根據(jù)上部分的象限圖加以詳細(xì)分析。
當(dāng)發(fā)生處于第一象限的情境時(shí)�,動(dòng)態(tài)因素與靜態(tài)因素均對(duì)事故發(fā)生起推動(dòng)作用,此時(shí)無(wú)論對(duì)駕駛者還是自動(dòng)駕駛系統(tǒng)的注意義務(wù)都較低��,雙方對(duì)最終的結(jié)果都存在不承擔(dān)責(zé)任的可能性���。同時(shí)�����,在區(qū)域1中���,自動(dòng)駕駛系統(tǒng)免責(zé)的可能性最高����,在區(qū)域2中�,駕駛者免責(zé)的可能性最高。同理�,當(dāng)發(fā)生處于第三象限的情境時(shí),無(wú)論是駕駛者還是自動(dòng)駕駛系統(tǒng)均不可能對(duì)損害結(jié)果免責(zé)���。例5����,當(dāng)面臨強(qiáng)光照射且路面積雪堆積時(shí)�����,在道路曲率較大的公路上面對(duì)緊急情況���;例6���,當(dāng)照明充足且路面平整時(shí)��,在筆直的公路上面對(duì)緊急情況����。駕駛者與自動(dòng)駕駛系統(tǒng)在以上兩個(gè)例子中的反應(yīng)明顯是存在差別的���。例6相較例5��,更應(yīng)適用期待可能性免除刑事責(zé)任。
而當(dāng)發(fā)生處于第二象限的情境時(shí)�,動(dòng)態(tài)因素起推動(dòng)作用,靜態(tài)因素起防止作用���,駕駛者免責(zé)的可能性較高���,自動(dòng)駕駛系統(tǒng)免責(zé)的可能性較低。同時(shí)�����,即使雙方都承擔(dān)刑事責(zé)任,在量刑方面�����,對(duì)駕駛者的量刑也應(yīng)相應(yīng)降低���。同理�����,當(dāng)發(fā)生處于第四象限的情境時(shí)�����,駕駛者免責(zé)的可能性較低�,自動(dòng)駕駛系統(tǒng)免責(zé)的可能性較高�����。同時(shí)����,即使雙方都承擔(dān)刑事責(zé)任,在量刑方面�,對(duì)自動(dòng)駕駛系統(tǒng)設(shè)計(jì)者及廠商的量刑也應(yīng)相應(yīng)降低��。例7��,當(dāng)面臨強(qiáng)光照射且路面積雪堆積時(shí)����,在筆直的公路上面對(duì)緊急情況���;例8�,當(dāng)照明充足且路面平整時(shí)���,在道路曲率較大的公路上面對(duì)緊急情況��。在例7中��,駕駛者相較于自動(dòng)駕駛系統(tǒng)更有可能適用期待可能性免除刑事責(zé)任,而在例8中���,則是自動(dòng)駕駛系統(tǒng)相較于駕駛者更有可能適用期待可能性免除刑事責(zé)任��。
余論
人機(jī)共駕模式下的“電車(chē)難題”作為當(dāng)前技術(shù)發(fā)展下可以預(yù)見(jiàn)到的問(wèn)題�,對(duì)其展開(kāi)討論絕非無(wú)用功����。同時(shí)�,對(duì)于本文提及的突發(fā)情形等較難預(yù)測(cè)的變量�����,也不應(yīng)成為立法的障礙�。此外,今后還需吸納與分析人機(jī)共駕模式下認(rèn)定事故責(zé)任的證據(jù)����。對(duì)于可能影響案件事實(shí)的車(chē)內(nèi)錄像、方向盤(pán)的手掌觸感及力度的數(shù)據(jù)等證據(jù)��,也需要在規(guī)范層面加以肯定�,從而確保更加公正地認(rèn)定案件事實(shí)。
因篇幅限制�����,已省略注釋及參考文獻(xiàn)���。原文詳見(jiàn)《河北法學(xué)》2025年第3期
")